

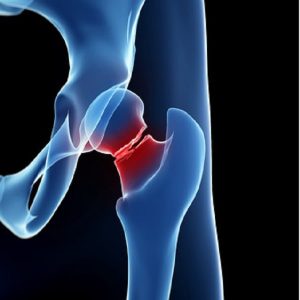
הגישה הניתוחית למפרק הירך על מנת לבצע ניתוח החלפת מפרק

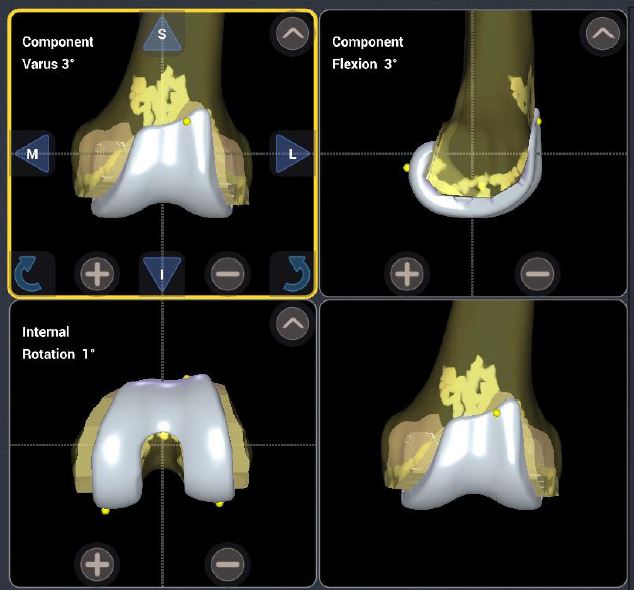
סוגי משתלים בהחלפת מפרק הירך ניתוחי החלפת מפרקי הברך והירך

הבחירה בטיפול ניתוחי לכאבים הנובעים משחיקת סחוס נעשית תמיד רק

הברך האנושית בנויה משלושה מדורים. המדור הפנימי, המדור החיצוני והמדור הקדמי

הפגיעה בברך בעת שחיקת סחוסים היא פגיעה נרחבת. זאת בשונה




